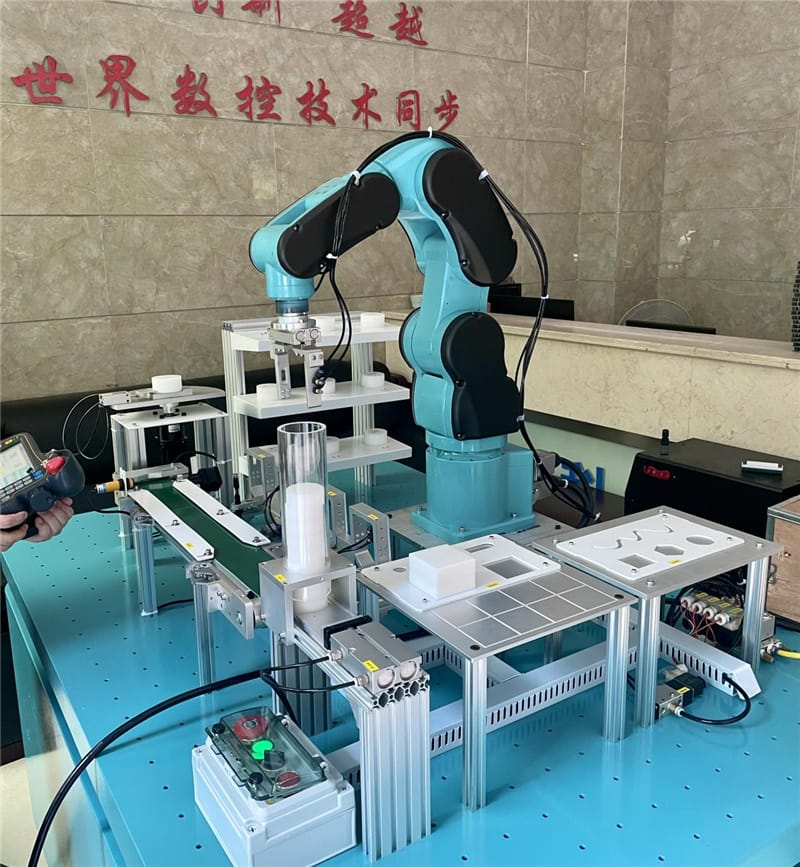




6 צירים חינוך או זרוע רובוט מפרקית Diy Delta או זרוע רובוט מצלמה
מִפרָט
ציר: 6
עומס מרבי: 4 ק"ג
מיקום חוזר: ±0.01 מ"מ
לחות שימוש: 20-80%
סביבת מרווה: 0℃-45℃
התקנה: קרקע
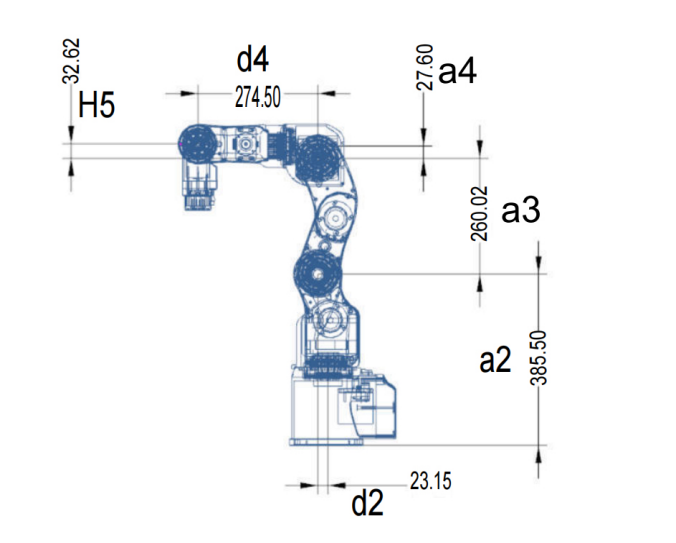
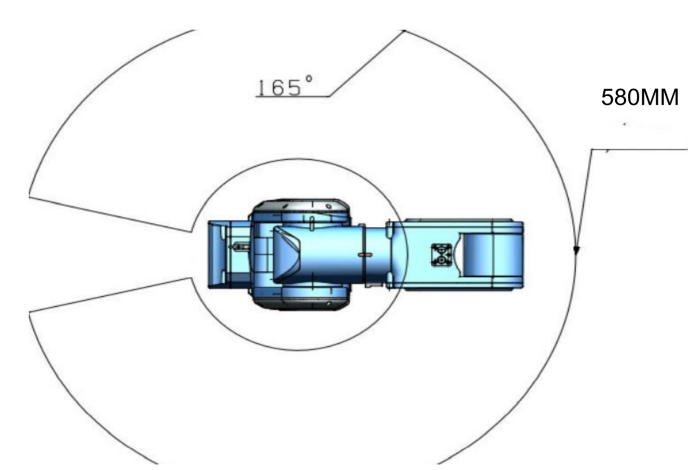
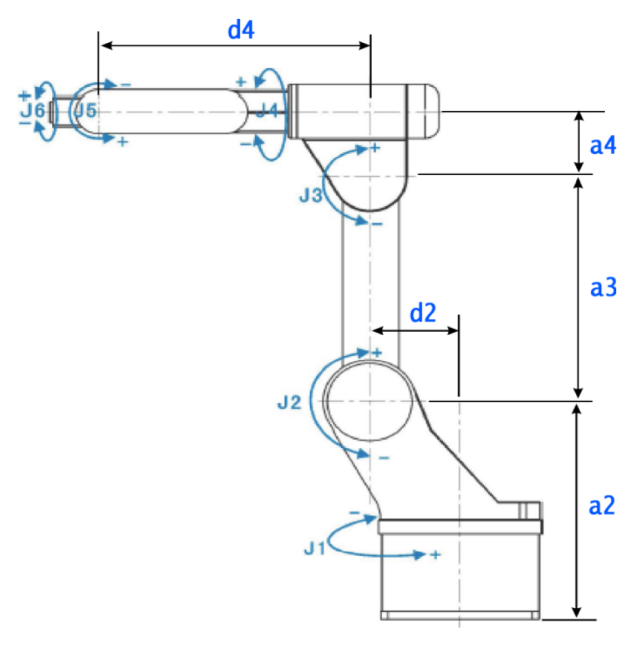
טווח עבודה: J1:±165°
J2:-100°~+120°
J3:+150° ~-60°
J4:±175°
J5:+130° ~-30°
J6:±180°
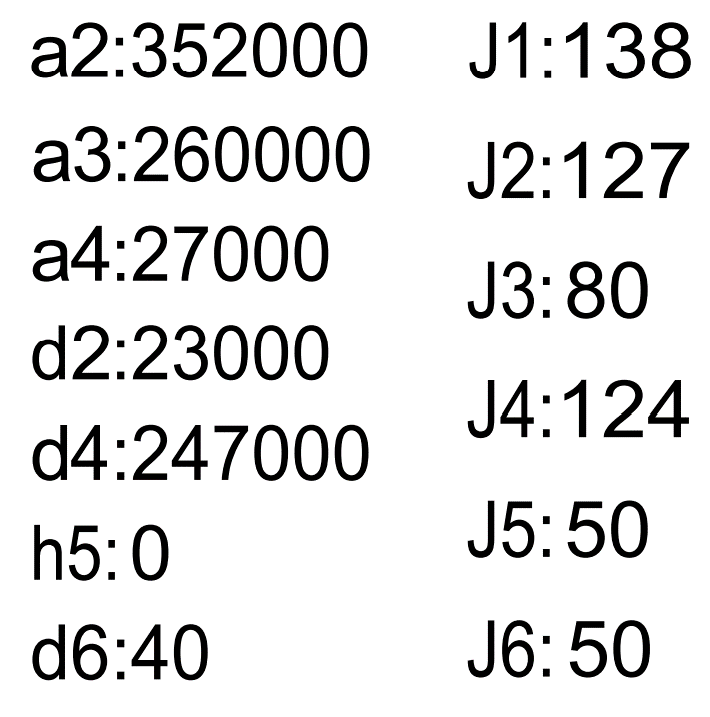
מהירות מרבית: J1:260°/s
J2:250°/s
J3:250°/s
J4:250°/s
J5:200°/s
J6:760°/s
טווח עבודה:
התקנה בסיסית:
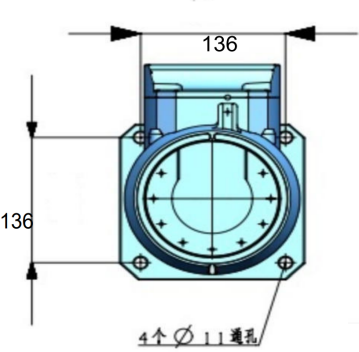
התקנה בסיסית:
יישומים
יישומים חינוכיים:
1. ללמוד את ההרכב הבסיסי של מערכת הרובוטים.
2. ללמוד את פונקציות התכנות וההוראה של תליון לימוד הרובוט.
3. ללמוד את הידע הבסיסי של תכנות רובוט לא מקוון.
4. ללמוד את הפעולה ותכנות היישום של רובוט io.
5. ללמוד יישומים חזותיים של רובוטים
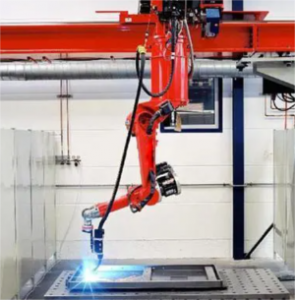
סצנות מסחריות: גלידת רובוט רובוט ברמן רובוט קפה רובוט חלב תה סצנות בתעשייה קלה: מדידה מחלק בדיקה מיון
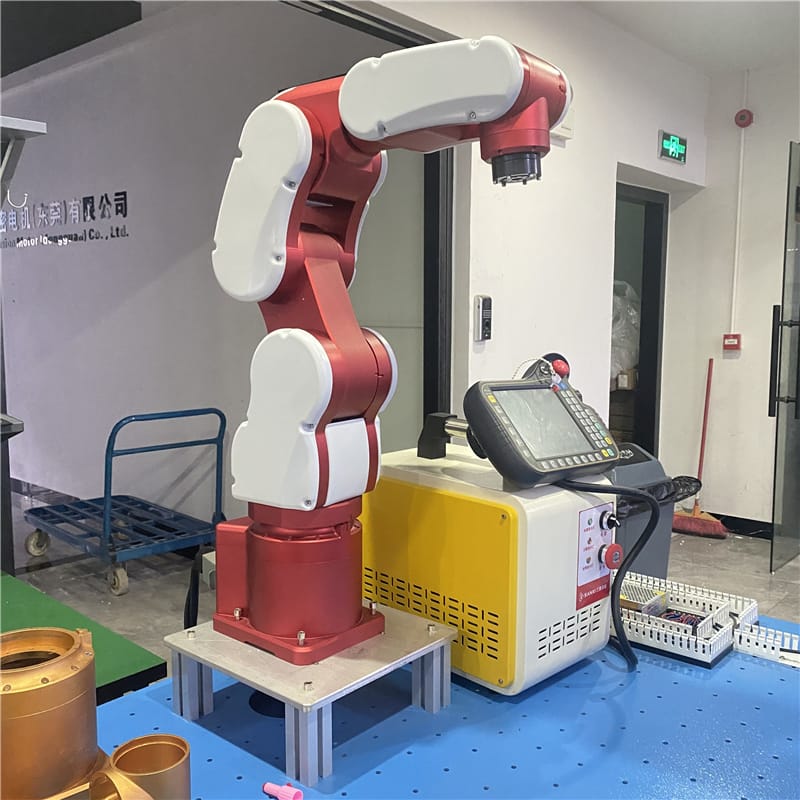
תכונות המוצר
זרוע רובוטית: הזרוע הרובוטית עשויה מיציקות אלומיניום דרך מרכז עיבוד CNC, והמשטח מרוסס בפלסטיק ויש לו מראה יפהפה.
חור כבל שמור: לזרוע הרובוט יש חורי כבלים שמורים, שהם יפים ואינם מעכבים את פעולת המניפולטור. קצה קנה הנשימה שמור ליציאה ולמחבר כבל הנתונים.
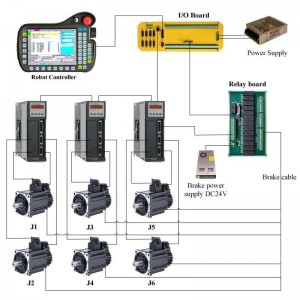
לוח בקרה: תצוגת LCD עם מסך גדול, שיטת תצוגת שפה יכולה להתבסס על צרכי הלקוח, תפעול ותכנות פשוטים וברורים, עם שינוי פרמטר מקוון ופונקציות אבחון עצמי של תקלות.
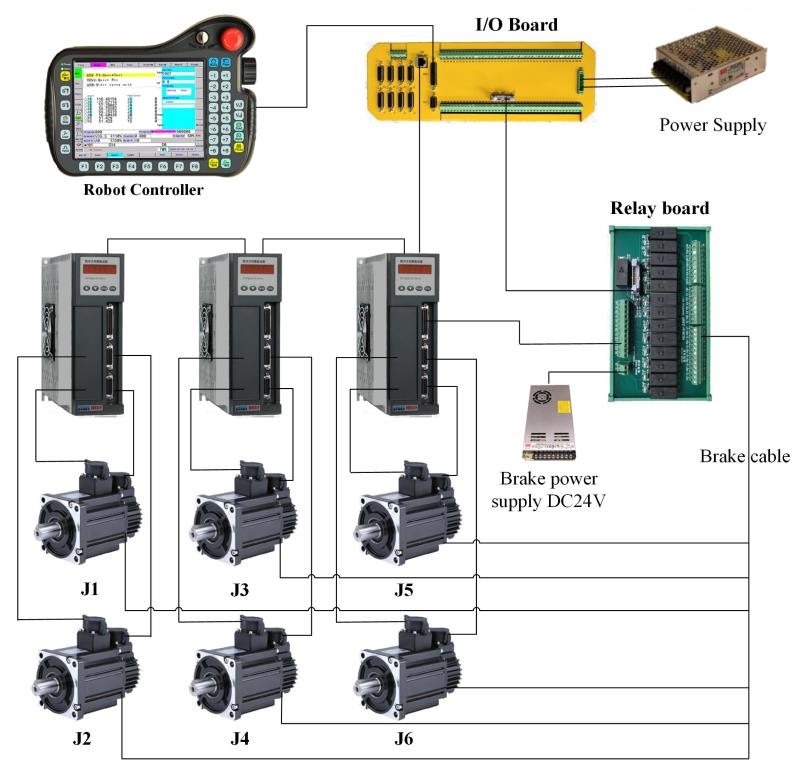
ארון בקרת רובוט: מערכת בקרת התנועה החכמה מאמצת טכנולוגיית מחשב תעשייתית, ומודול הסרוו הדיגיטלי מספק כוח הנעה למנועי סרוו AC של כל מפרק של הרובוט.
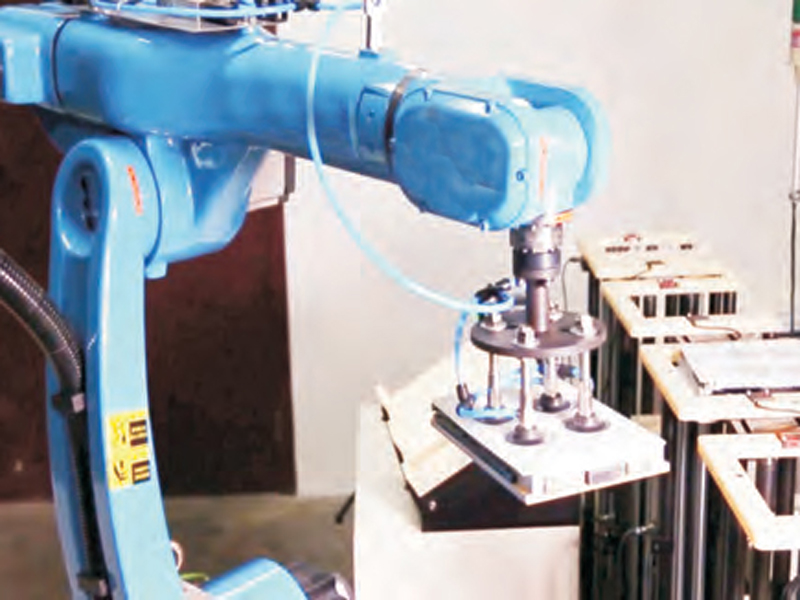
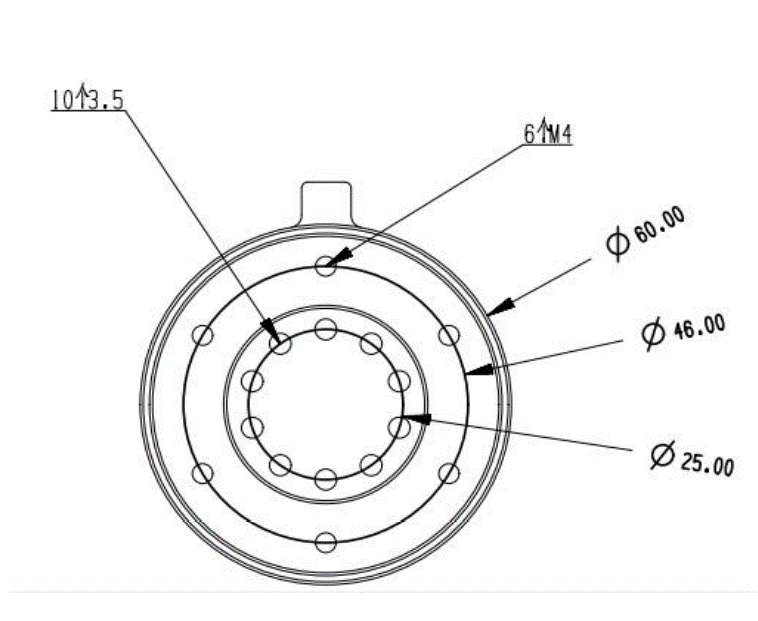
מתקנים רובוטיים: מתקן הכלים יכול לבחור כוח משיכה וכמות שונים בהתאם לדרישות המותאמות אישית, והוא מותקן על אוגן הקצה, שקל להתאים ובעל מגוון רחב של שימושים.